基于北斗卫星的高精度定位移动终端设计与实现
安全是铁路永恒的主题,列车速度的不断提高,行车密度的日益加大,在高速带动社会经济发展的同时,也带来了更多的安全隐患。基于此,设计与开发一种安全可靠的人员便携终端,对施工现场进行监测,对确保铁路运输的安全和提高效率至关重要。
基于北斗卫星的高精度定位移动终端能通过4G网络或者无线电台接收生成围栏的指令,也可本地自生成围栏信息,并利用这些信息自动生成施工现场电子围栏并以警戒,利用物联网信息传输技术,接收来自地面差分站的RTK信息,从而提高定位精度,实现列车接近作业区域和人员、设备越界的实时预警,确保施工安全。
本论文设计的高精度定位移动终端采用了STM32F103RGTx为主控芯片,使用我国北斗卫星导航定位系统获取精确的定位信息,使用物联网通信技术发送实时定位状况,同时用语音对定位状态进行实时播报,对铁路工务施工人员或大型设备进行精准定位和监控,通过设置围栏警戒,为施工人员界定安全的区域,及时对施工人员或大型设备进行预警,实现铁路施工安全防护,有效的预防安全事故的发生。
第1章 绪 论........................................................................................ 1
1.1 论文研究主要内容.................................................................................. 1
1.2 国内外现状............................................................................................. 1
第2章 关键技术介绍............................................................................ 3
2.1高精度北斗组合定位技术........................................................................ 3
2.2电子围栏生成技术................................................................................... 4
第3章 系统分析.................................................................................... 6
3.1 构架概述................................................................................................. 6
3.1.1 功能构架.................................................................................................................. 6
3.1.2 模块需求描述.......................................................................................................... 7
3.2 硬件选择................................................................................................. 7
3.2.1 MCU主控芯片选择................................................................................................. 7
3.2.2 定位模块选择.......................................................................................................... 7
3.2.3 数传电台模块选择.................................................................................................. 7
3.2.4 语音模块选择.......................................................................................................... 8
3.3 系统开发环境.......................................................................................... 8
3.4 系统任务的可行性分析........................................................................... 8
3.4.1 技术可行性.............................................................................................................. 8
3.4.2 系统可靠性分析...................................................................................................... 8
3.4.3 系统可拓展性分析.................................................................................................. 8
3.4.4 经济实用性分析...................................................................................................... 9
第4章 系统设计.................................................................................. 10
4.1系统构架概述......................................................................................... 10
4.2 GPS模块电路........................................................................................ 10
4.3 STM32F103RGTx单片机模块............................................................... 11
4.4 BY8301语音模块................................................................................... 12
4.5 P900数传电台模块................................................................................ 13
第5章 系统实现.................................................................................. 15
5.1 GPS定位以及围栏功能的实现.............................................................. 15
5.2 MCU底层驱动的实现............................................................................ 16
5.3 语音模块的实现.................................................................................... 17
5.4 P900数传电台模块的实现..................................................................... 19
第6章 系统测试.................................................................................. 20
6.1 测试概述................................................................................................ 20
6.2 单片机测试............................................................................................ 20
6.3 GPS模块测试........................................................................................ 21
6.4 电台模块测试........................................................................................ 21
6.5 语音模块测试........................................................................................ 22
6.6 系统综合测试........................................................................................ 22
施工人员终端首先通过打点功能自动生成以自我为中心的圆形围栏进行警戒,通过接收网络管理平台下发的电子围栏区域坐标进行存储,当施工人员或者大型设备移动时,将实时的北斗高精度组合定位坐标信息与电子围栏警戒区域信息进行对比,当判断为坐标在电子围栏警戒区域外时,将立刻向网络管理平台进行报警,同时网络管理平台将接收到围栏预警信息与自身判断的围栏预警进行判断对比分析,确实为预警信息时显示预警信息,实现对工务的远程监控和管理,其电子围栏的判断流程如图

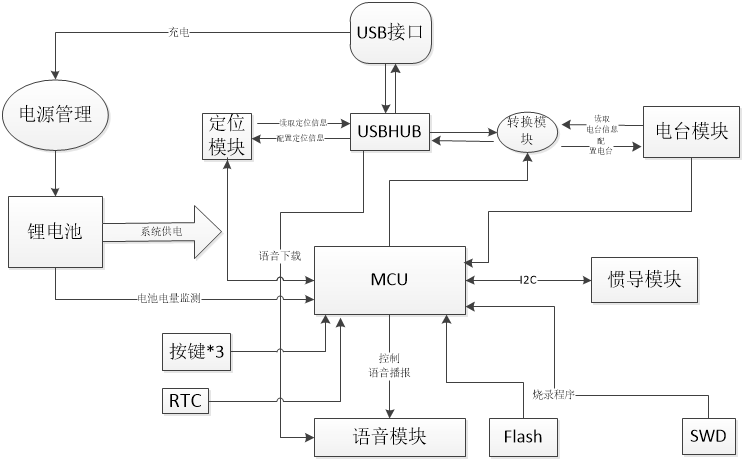
本设计所用到的主要模块有电源管理模块,高精度定位模块,电台模块,惯导模块,语音模块以及主控MCU,电源管理模块可通过USB接口给锂电池充电,同时电源管理模块也可输出线性电压值供给MCU检测剩余电量,定位模块主要用于采集定位信息,并且处理和分析差分信息,得到精确的定位数据,定位模块可通过USB口进行配置,语音模块用于播放预警信息,剩余电量等语音,MCU通过串口控制语音模块,语音可通过USB下载到语音模块自带的Flash中,电台模块用于接收差分信息,并将差分信息通过串口通信发送给MCU,惯导模块用于辅助推算,定位时融合惯导算法,能保证在丢失GPS信号的情况下,不会立即无法定位,而是会通过加速度等参数,推算定位。本系统通过定位模块获取的实时定位信息,可以生成电子围栏并保存在MCU中,通过电台获取差分,提高定位精度,生成围栏后,会实时判断人员是否处于围栏之中,当人员离开围栏,会立即有语音提示,同时,本系统通过可充放电的锂电池供电,便携性很高。本系统总设计图如图所示。
(1)MCU主控芯片
MCU作为系统的核心部分,首先要考虑其性能,需要其有足够的片内资源,以及高速的主频,根据其他模块所需的资源,选择合适的芯片,在保证满足需求的同时,不造成资源的浪费。
(2)定位模块
定位模块用于接收卫星信号,并向MCU提供定位信息,需要保证即使接收不到RTK差分信息也能有足够高的定位精度。
(3)数传电台模块
数传电台模块用于在没有4G信号的情况下,也能将数据传输出去,需要保证数据传输的速率和可靠性,其主要指标为空中传输速率以及最大传输距离。
(4)语音模块
语音模块用于实施播报定位状态,由于有多种语音,它需要具备足够的内部储存空间,以及能随时更换语音资源,由于音频文件的格式可能不是完全一致,还需要它具备多种格式音频的解码功能。
本设计选择了u-blox ZED-F9P定位模块来采集位置信息,该模块的原理图如图所示。u-blox ZED-F9P具有定位速度快,定位精度高,支持RTK差分定位等特点,定位模块与MCU采取UART通信方式,MCU的TX接定位模块的RX,MCU的RX接定位模块的TX,GPS数据协议采用PVT协议。GPS模块电路如图所示。
(1)引脚说明:
①
VCC供电;
② RX
串口接收数据,与MCU的TX相连;
③ TX
串口发送数据,与MCU的RX相连;
④ GND
地。
(2)PVT协议:
PVT协议是将一系列定位数据按顺序打包成一个16进制字符串的数据形式,以下为数据包中本设计主要用到的数据。
①
UTC:UTC时间戳;
②
fixType:差分状态,5为浮点解差分,4为固定解差分;
③
gnssFixOK:是否定位成功标志;
④
pDOP:推算定位
,获取到的值越小,当前定位精度越高;
⑤
lon:经度,获取的值为实际经度*100000000;
⑥
lat:纬度,获取的值为实际纬度*100000000。
- 微信
- 赶快加我聊天吧

- 开发交流群
- 海纳百川,大家来水
