防碰撞自动倒车入库系统的仿真与实现
近年来,我们对汽车工业发展的需求和安全性的提高也在不断提高,汽车领域的汽车避让系统设计技术也各不相同。在当今的汽车领域,汽车运动避免作为汽车产业链的新兴研究领域而发展,并且在未来的汽车工业中具有广泛的前景。及时了解恶劣的环境条件及其适应性,必须为大多数汽车制定技术计划。
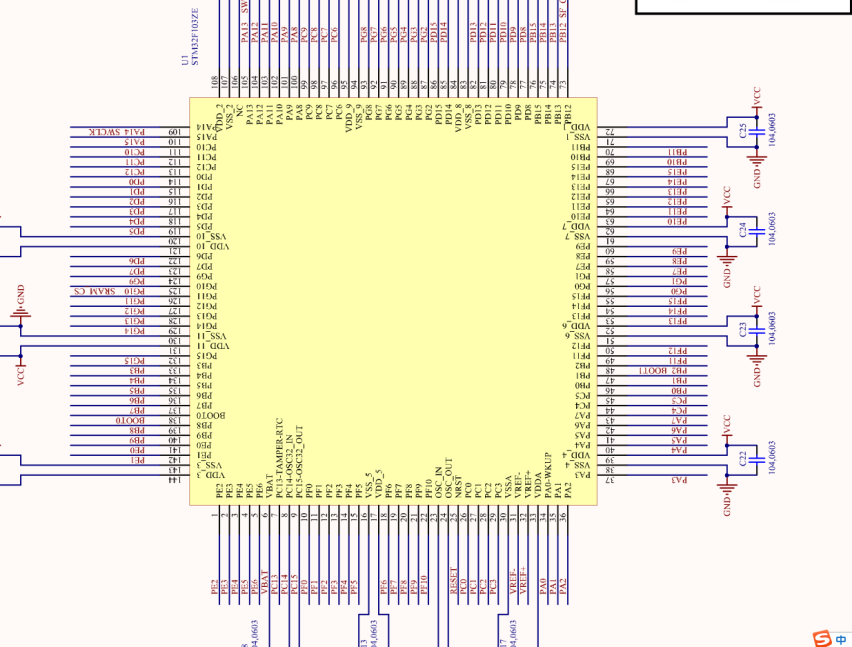
STM32是微控制器系列中广泛使用的单片机,在自动控制领域具有很高的价值,它的便利性和多功能性已经受到许多电子开发人员的欢迎。本次系统设计中的测量距离功能和报警功能都是应用前面我们选用好的单片机作为核心控制器、超声波传感器、openMV 模块共同完成以上两个功能的实现,用STM32做本次系统设计控制的主要芯片,以及超声波检查车辆与障碍物间距离的功能,首先测量车辆与障碍物之间的距离,然后使用STM32处理并比较报警距离值。如果距离小于行程值,STM32提供控制蜂鸣器的提示。发声器报警。温度传感器用于确定温度的补偿函数,该设计计算是由于温度效应导致的测量结果的误差影响,以及在设计中提高的测量精度。通过STM32与openMV之间的通讯来确定车车门的位置,通过对openMV摄像头去识别车门的颜色,openMV摄像头可以生成像素,通过阈值就可以识别车门。
2.3 比例(P)、积分(I)、微分(D)控制算法各有作用. 8
闭环控制是通过对被控对象的输出的反馈进行校正的控制方法,并在测量计划的实际偏差时根据配额或标准进行校正。提到闭环控制算法,不得不提PID,它是闭环控制算法中最简单的一种PID是比例 (Proportion) 积分 ,(Integral) 微分 ,(Differential coefficient) 的缩写,分别代表了三种控制算法。通过这三个算法的组合可以纠正被控制对象的偏差,从而使其达到一个平稳的状态。如下图所示为PID的流程。

本设计可以分成两个部分分为报警系统和倒车系统,报警系统是有超声波模块,LCD1602显示模块,蜂鸣器。倒车系统包括电机,openMV。首先通过对小车的焊接,将整个小车拼装起来,第一步将单片机的核心板固定在小车上,第二步将电机焊接接线,之后连接到核心板上(核心板上面有标识例如R后),第三步给单片机连接电源,这里注意红线为正,黑线接地,第四步,将小车的车轮安装好,整体的小车模型已经安装好了,下面开始下载程序,测试小车。

系统的显示部分采用LCD1602作为显示器件,显示器件内部有自己的处理器(HD44780),只需要单片机按照一定的规则发送相应的数字,显示器件就会显示。这样就不像数码管那样还得不停的扫描,可以大大的提高单片机的利用率。并且1602可以显示更多的字符,可以更加直观的让用户了解系统的相关参数,方便于用户的操作。
系统运行时LCD1602显示的内容:
防碰撞自动倒车入库系统的仿真与实现,是基于智能小车基础上,通过超声波的测距,用openMV去确定车门的位置,通过PI控制倒车的路线,。
优点在于系统体积小、结构紧凑、测距范围较大且测量误差小,易于产品化,具有较强的实用价值。可用于距离探测和方位探测。
- 微信
- 赶快加我聊天吧

- 开发交流群
- 海纳百川,大家来水
